Umbau Fleischmann 7350 120 002-1 DB
Modell:
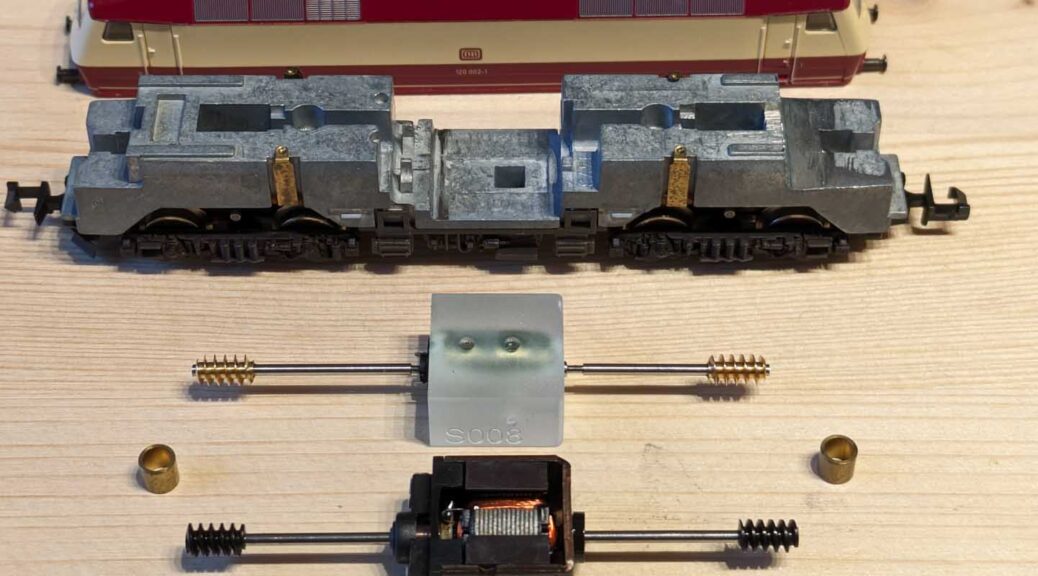
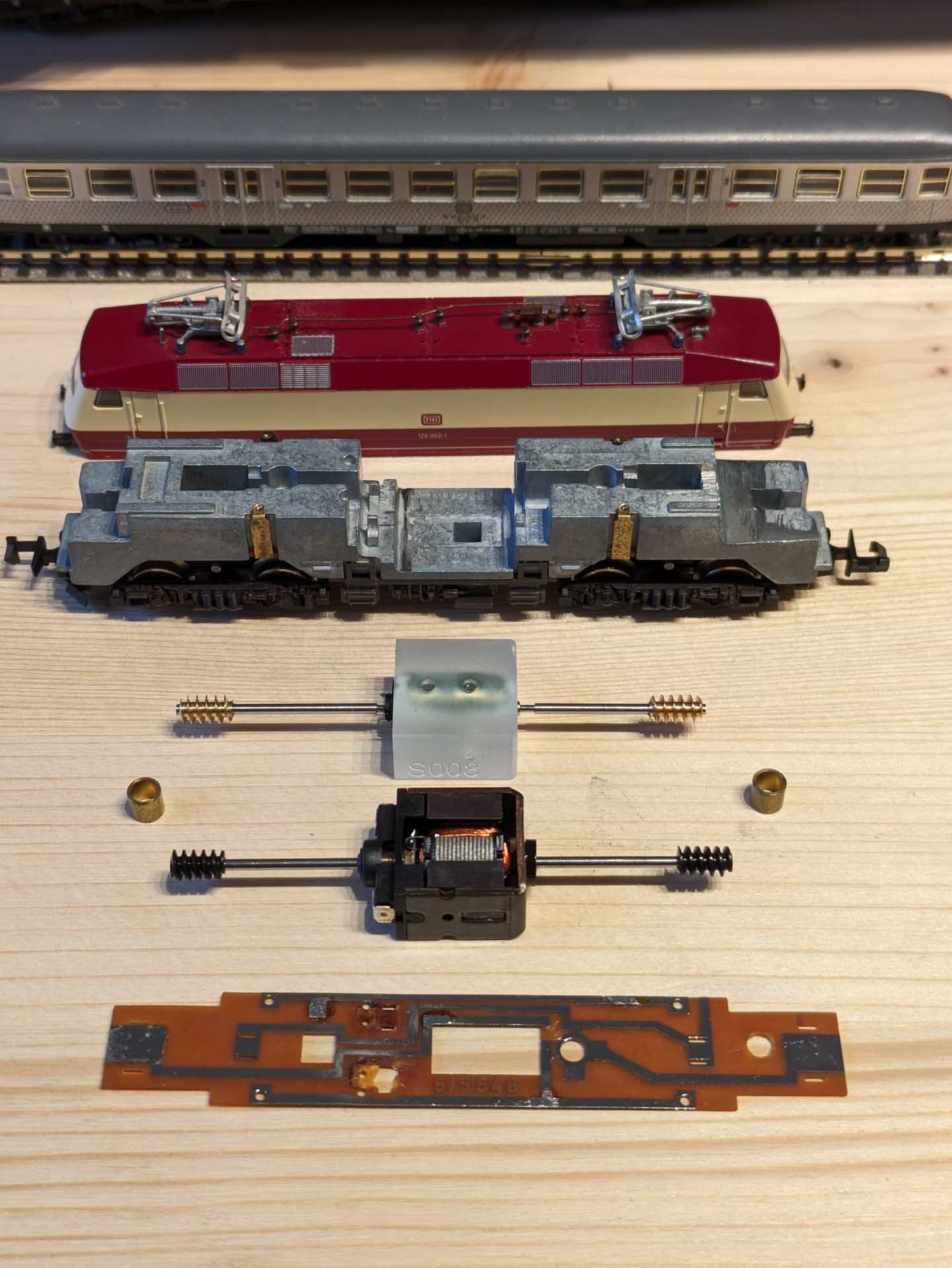
Lok-Chassis aus Zink-Druckguss. Fahrgestell und Gehäuse aus Kunststoff. 3-Poliger Motor (Flm. 507350) ohne Schwungmasse. Antrieb auf alle vier Achsen, davon zwei Achsen mit je zwei Haftreifen. 3-Licht-Spitznsignal beidseitig, mit der Fahrtrichtung wechselnd. Steuerung analog. LüP: 120 mm.
Umbau:
Die Lok wurde meine einem Micromotor NF031C Motorumbausatz auf einen Glockenanker-Motor umgerüstet. Des Weiteren wurde die Lok mit einem ESU LokPilot 5 micro digitalisiert.
Der Umbau dieser Lok ist grundsätzlich recht einfach. Ich habe die Lok gebraucht erworben. Der Vorbesitzer hatte die Lok schon digitalisiert. Es war ein alter Kühn-Decoder verbaut. Allerdings wurde der Umbau nicht sachgemäß durchgeführt. Dies führte zu einer Beschädigung des Decoders und Motors. Die Lok lief so gut wie gar nicht, und war mehr oder weniger unkontrollierbar.
Zunächst habe ich den alten Decoder und alle Teile auf der Platine entfernt. Die Federklemmen für die Beleuchtung waren beschädigt, bzw. eine wurde ganz entfernt.
Im nächsten Schritt wurde der alte Motor entfernt, und durch den neuen ersetzt. Der Umbausatz passt zu 99 %. Das restliche eine Prozent wurde mit einer kleinen Schlüsselfeile am Rahmen angepasst. Der Motor ist etwa 1/10 mm zu lang, sodass er nicht richtig in die Führung passt. Diese kleine Hürde war aber schnell genommen.
Da der Vorbesitzer für den deutlich größeren Kühn-Decoder bereit eine Ausfräsung am Rahmen durchgeführt hatte, platzierte ich den Decoder auch genau an diese Stelle. Bei den heutigen Decodern wäre das allerdings nicht notwendig gewesen, diese passen problemlos auf die Trägerplatine.
Zum Schluss wurde alles verdrahtet, und in einem ersten Test die Funktion und korrekte Fahrtrichtung geprüft.
Das erste Fahrverhalten war erwartungsgemäß gruselig, da ein Glockenanker-Motor dann doch etwas anders angesteuert werden will. Vor allem dann wenn er -wie in diesem Fall- über keine Schwungmasse verfügt. Über den ESU Lokprogrammer wurde daher direkt ein voreingestelltes Profil für Glockenanker-Motoren kleiner Baugröße ausgewählt und programmiert.
Die Fahreigenschaften waren nun schon akzeptabel. Nach ca. 30 Minuten „warm fahren“ wurde anschließend noch mit etwas Feintuning optimiert. Nun waren die Fahreigenschaften perfekt. Leiser, runder Lauf über alle Fahrstufen und gute Regelbarkeit.
 Umbau Fleischmann 7350 120 002-1 DB (1)Umbau Fleischmann 7350 120 002-1 DB (1)
Umbau Fleischmann 7350 120 002-1 DB (1)Umbau Fleischmann 7350 120 002-1 DB (1)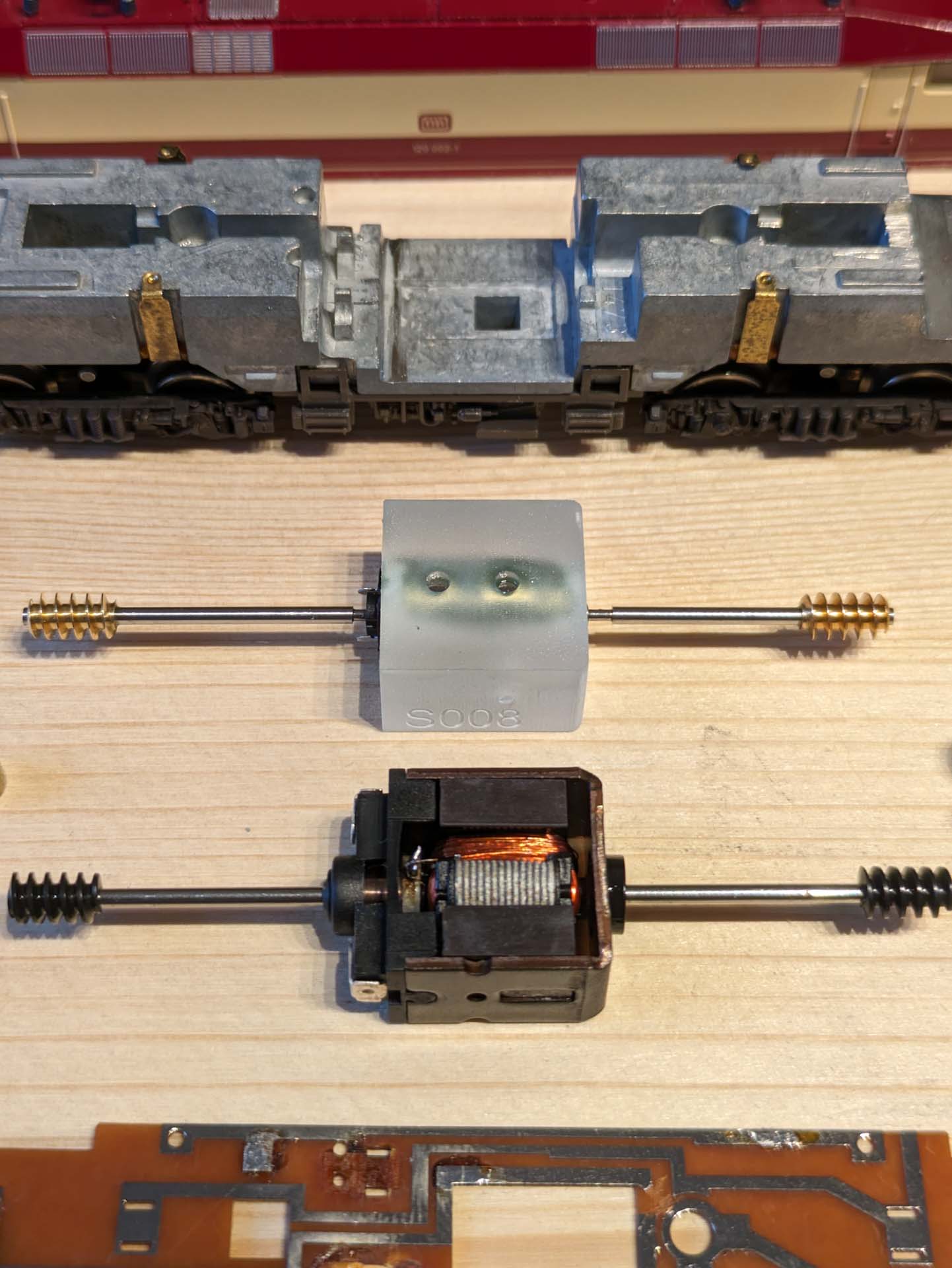 Umbau Fleischmann 7350 120 002-1 DB (2)Umbau Fleischmann 7350 120 002-1 DB (2)
Umbau Fleischmann 7350 120 002-1 DB (2)Umbau Fleischmann 7350 120 002-1 DB (2)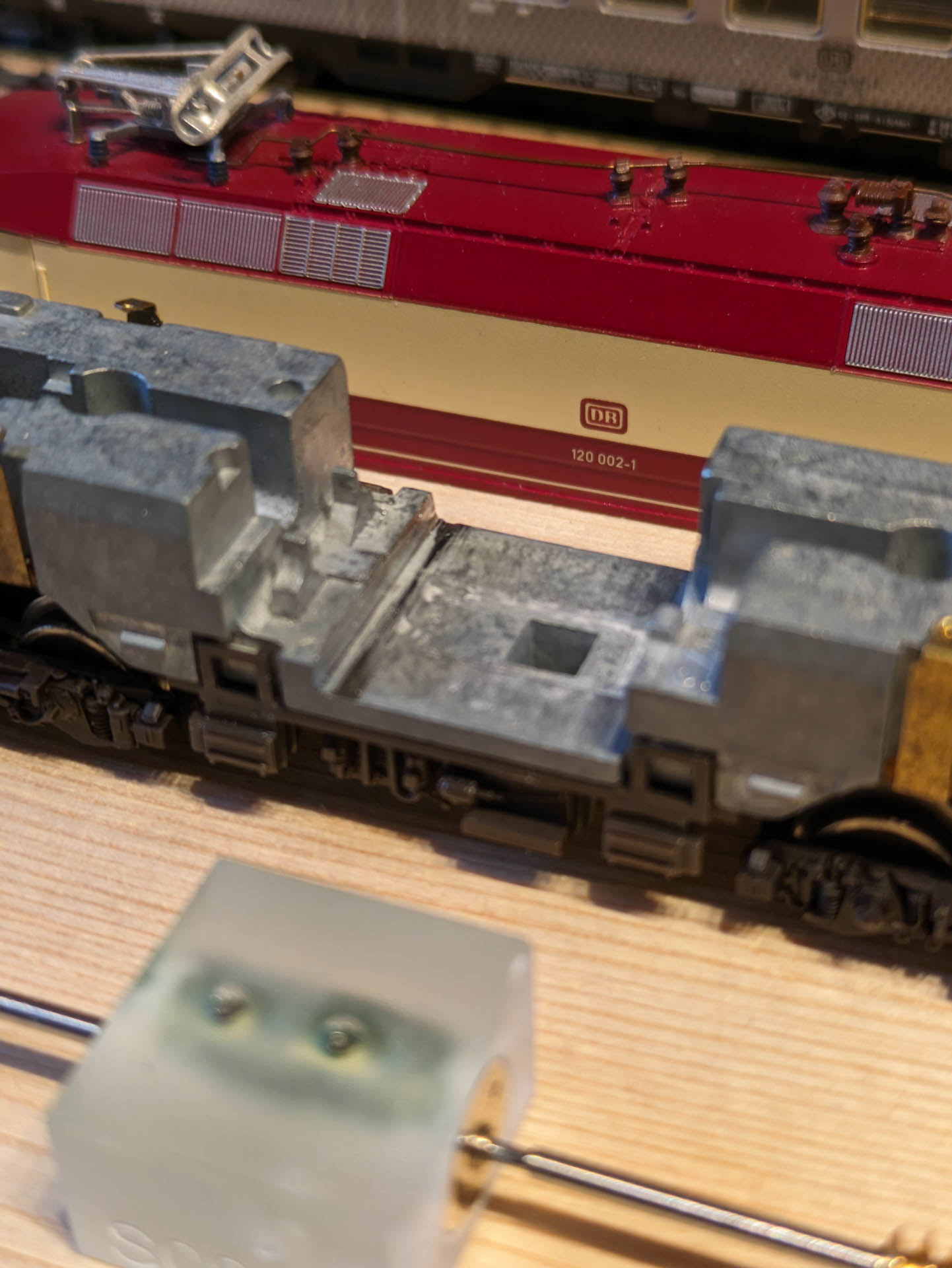 Umbau Fleischmann 7350 120 002-1 DB (3)Umbau Fleischmann 7350 120 002-1 DB (3)
Umbau Fleischmann 7350 120 002-1 DB (3)Umbau Fleischmann 7350 120 002-1 DB (3)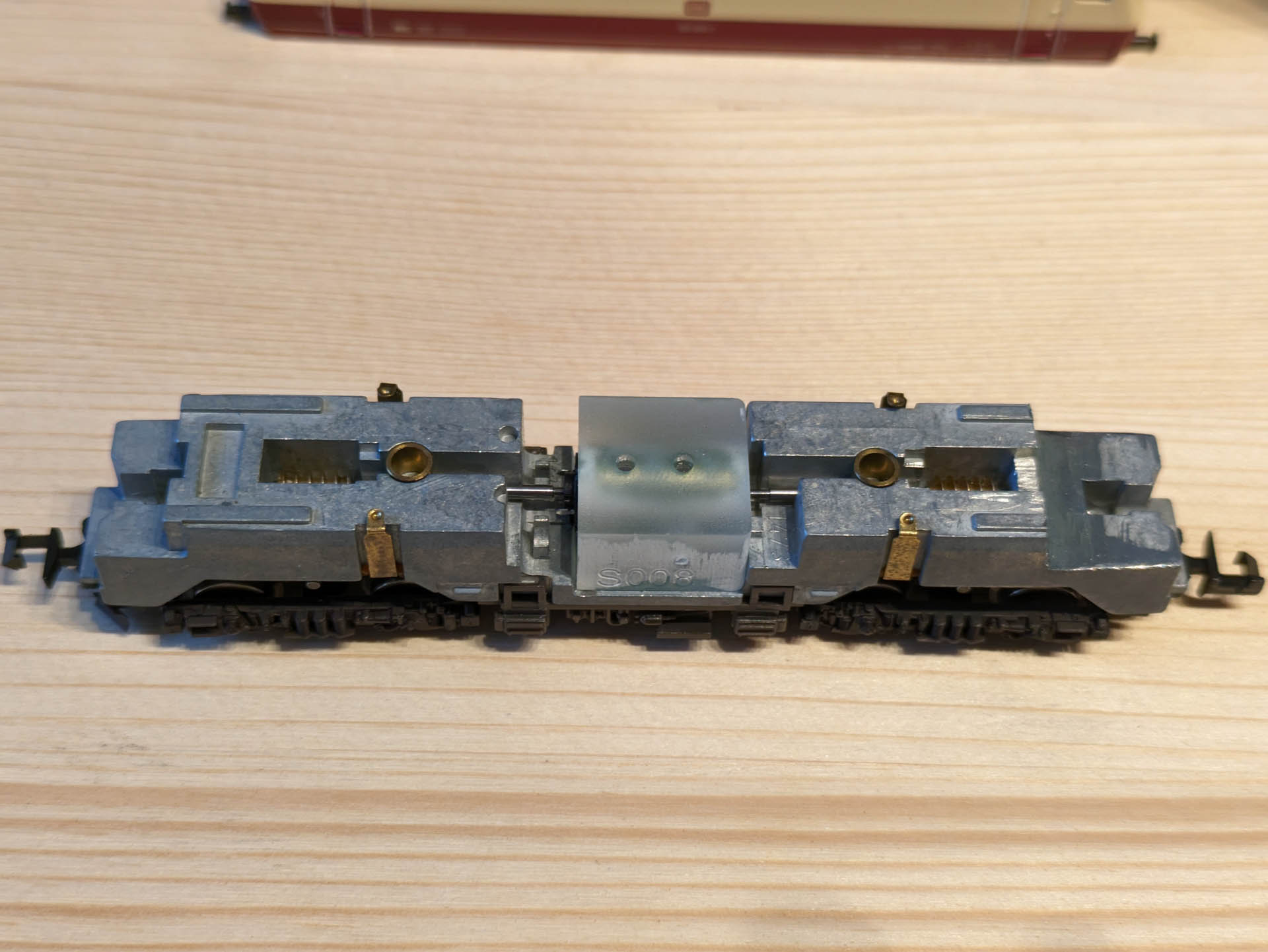 Umbau Fleischmann 7350 120 002-1 DB (4)Umbau Fleischmann 7350 120 002-1 DB (4)
Umbau Fleischmann 7350 120 002-1 DB (4)Umbau Fleischmann 7350 120 002-1 DB (4)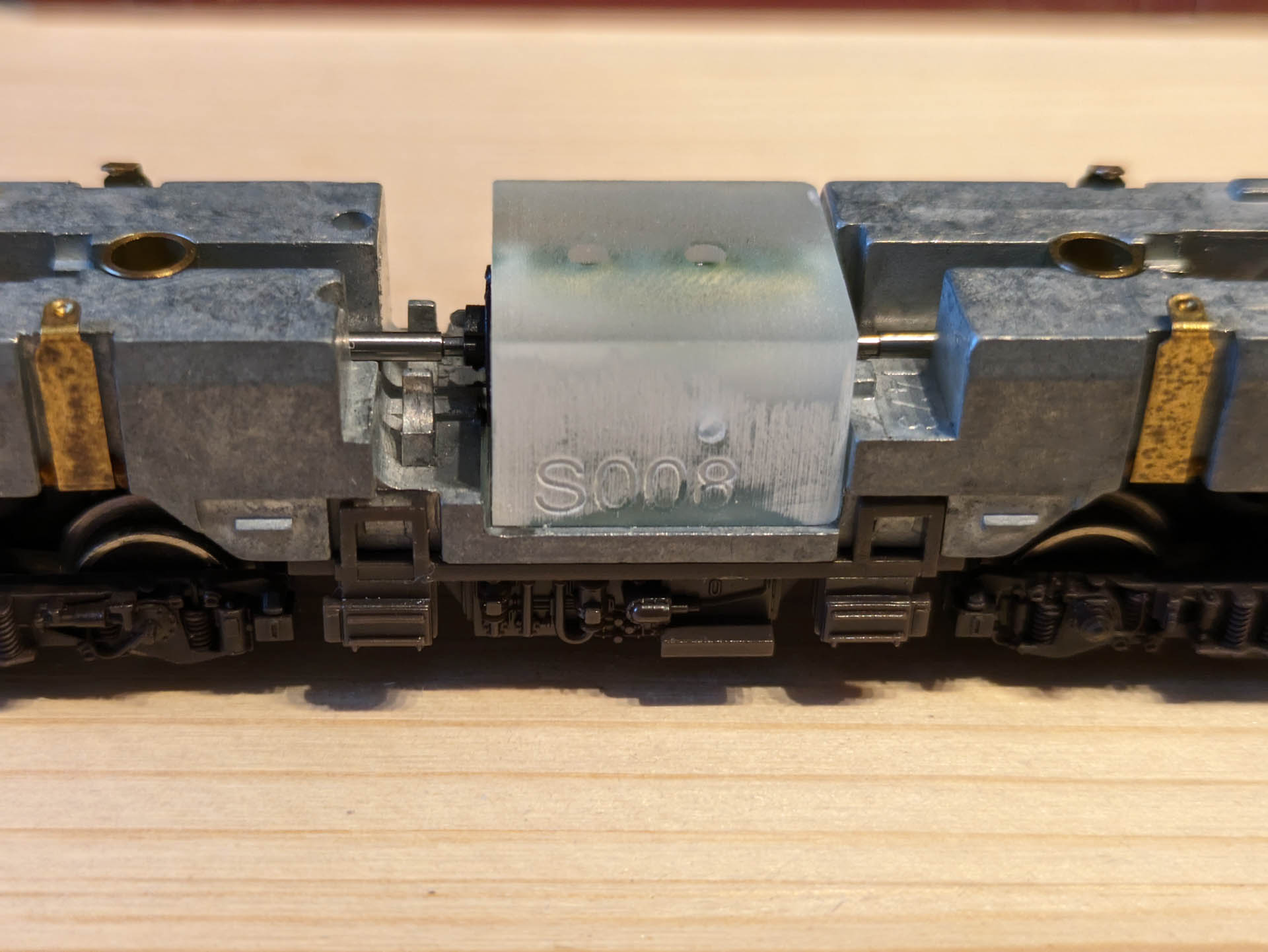 Umbau Fleischmann 7350 120 002-1 DB (5)Umbau Fleischmann 7350 120 002-1 DB (5)
Umbau Fleischmann 7350 120 002-1 DB (5)Umbau Fleischmann 7350 120 002-1 DB (5) Umbau Fleischmann 7350 120 002-1 DB (6)Umbau Fleischmann 7350 120 002-1 DB (6)
Umbau Fleischmann 7350 120 002-1 DB (6)Umbau Fleischmann 7350 120 002-1 DB (6)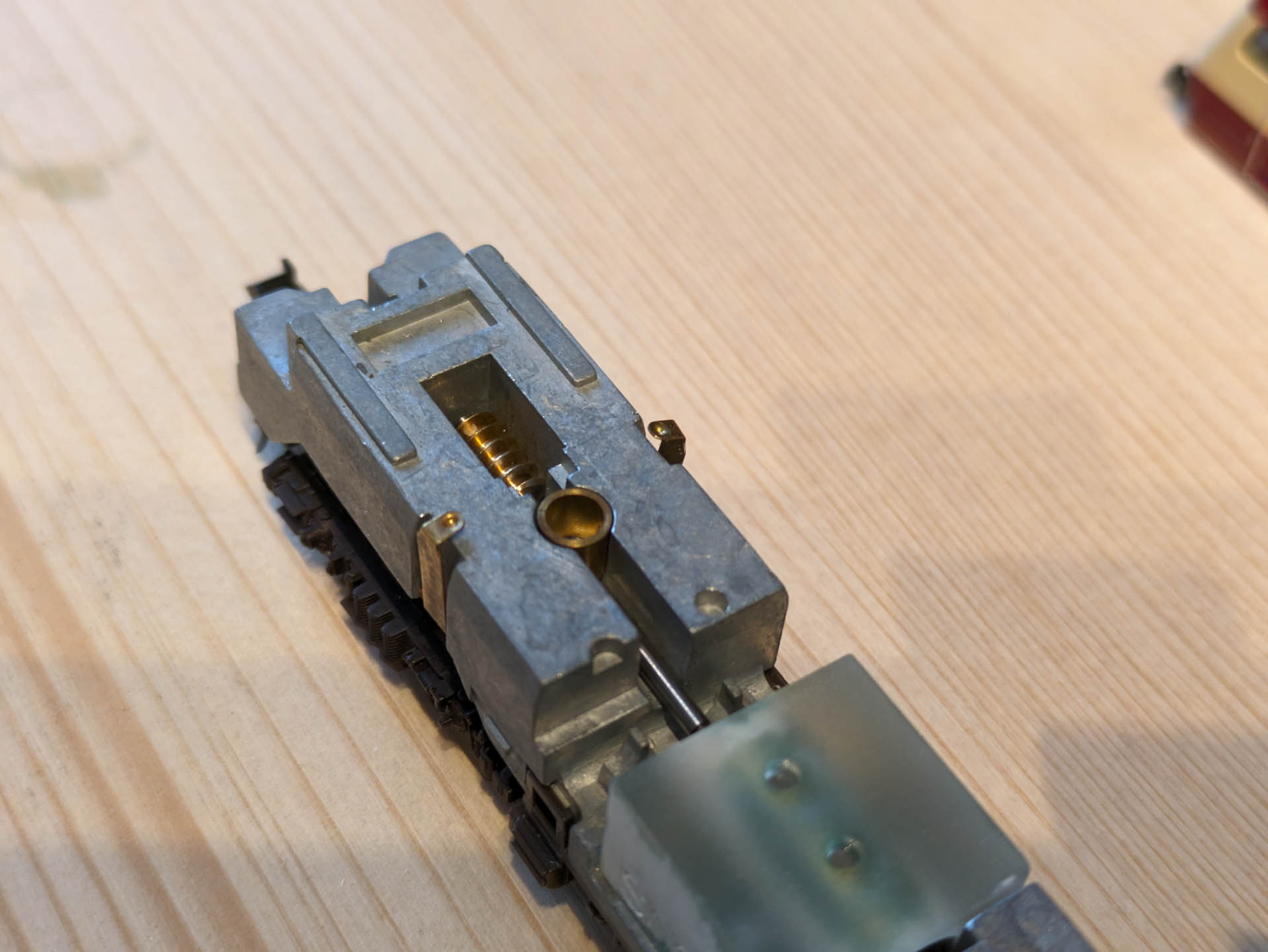 Umbau Fleischmann 7350 120 002-1 DB (7)Umbau Fleischmann 7350 120 002-1 DB (7)
Umbau Fleischmann 7350 120 002-1 DB (7)Umbau Fleischmann 7350 120 002-1 DB (7) Umbau Fleischmann 7350 120 002-1 DB (8)Umbau Fleischmann 7350 120 002-1 DB (8)
Umbau Fleischmann 7350 120 002-1 DB (8)Umbau Fleischmann 7350 120 002-1 DB (8) Umbau Fleischmann 7350 120 002-1 DB (9)Umbau Fleischmann 7350 120 002-1 DB (9)
Umbau Fleischmann 7350 120 002-1 DB (9)Umbau Fleischmann 7350 120 002-1 DB (9) Umbau Fleischmann 7350 120 002-1 DB (10)Umbau Fleischmann 7350 120 002-1 DB (10)
Umbau Fleischmann 7350 120 002-1 DB (10)Umbau Fleischmann 7350 120 002-1 DB (10)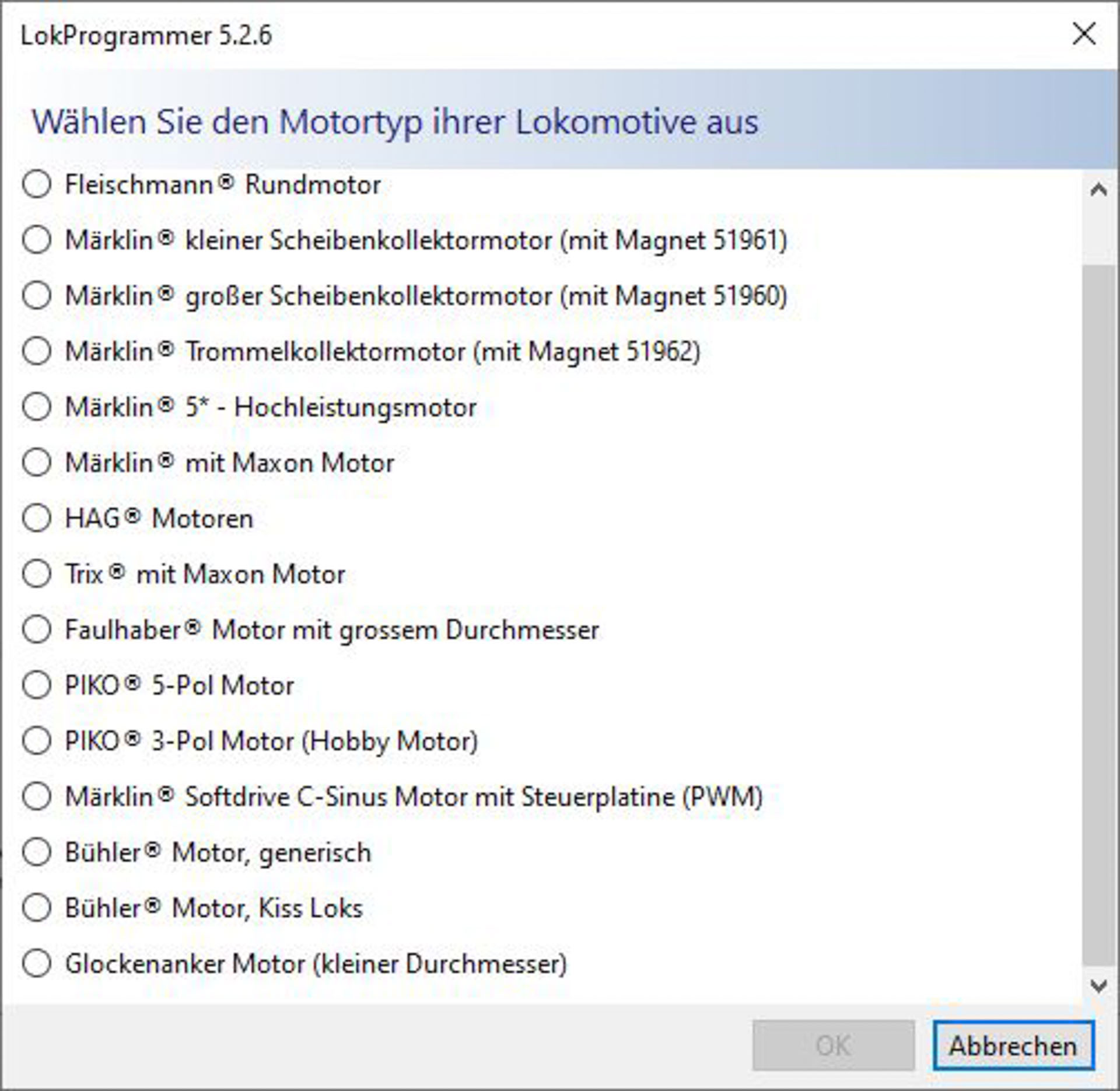 Umbau Fleischmann 7350 120 002-1 DB (11)Umbau Fleischmann 7350 120 002-1 DB (11)
Umbau Fleischmann 7350 120 002-1 DB (11)Umbau Fleischmann 7350 120 002-1 DB (11)